Description
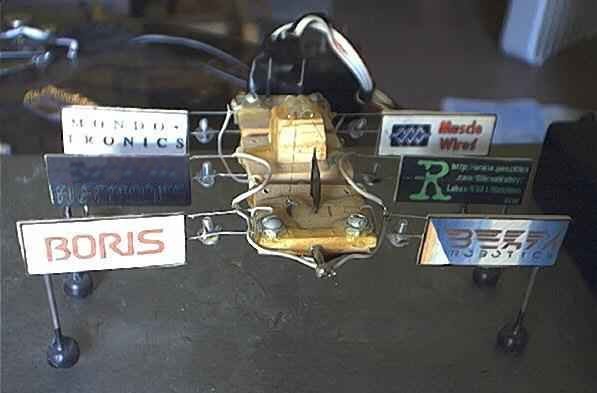
BORIS is a robot built based on a kit from mondotronics. It is a six legged walker. It currently has manual control, but it can be attached to a PC or a microcore with the proper drivers. The legs each have a banner (leave it to a company to make room on their kits for banners! :) Anyway, my version has a banner for it's name, BORIS, the BEAM robotics logo, My Richfiles web page address, the mondotronics name, and the muscle wires logo. Muscle wires contract when electricaly heated. They are an alloy of Nickel and Titanium. It is ductile when cool, but reshapes itself to an original shape when heated. Realy cool stuff, but it eats batteries like candy!

How to build BORIS
Well, I'd love to tell you how to build BORIS, but I'd highly recomend buying the project book from mondotronics. There is an 8 page set of instructions on how to build the robot. There are many exact measurements, and this page would be quite long if I were to describe complete assembly. For those reasons, I'm not putting detailed instructions on it's construction now (I may later though, if I get time). I will describe how to build a microcore based driver to control it. (later when I have time and scan the schematics)
For a video of BORIS, you can check out this clip from Algo's FACTory, which featured BORIS, a Photopopper, and Walkman Jr.
| LinkExchange Member | Free Home Pages at XOOM | Free Home Pages at GeoCities |

|
The Richfiles is copyright © 1996-2000. All Rights Reserved.
