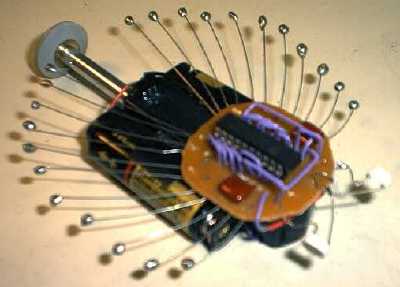
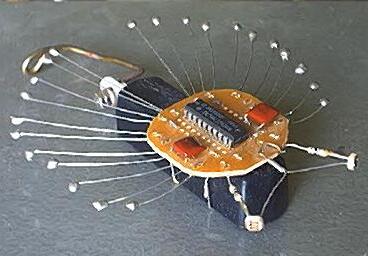
The Floor Monkey is a Bicore driven robot. The Bicore is a 2 Nv loop. It uses the 74AC240, a driving, schmitt inverter chip. It uses a pair of photo resistors to bias the amount of turn per direction. The rear is a leg like device attached to a Maxon motor. The motor does not have enough drive for legs, so I salvaged them from MECI IV M and used it for this and for a future 4 segment, 3 motor snake. This robot is similar to a "head" which is a light seeking device that aims itself in the direction of the brightest light source (or away for that matter). The diference here, is it simply sits on a floor or table and rolls it's tail to face the brightest light source. The obvious diference is that there is no stand. It simply sits on the floor.
I LOVE this robot. It hums, buzzes and then squeals when placed in light, it turns itself away from light sources, and in certain light levels (dark, but not too dark), it's 11 pairs of (asthetic) thoracipods will begin to chatter against each other as the motor begins to oscilate at a frequency close to the metal's resonant frequency! I'm very glad to see this very unexpected effect!
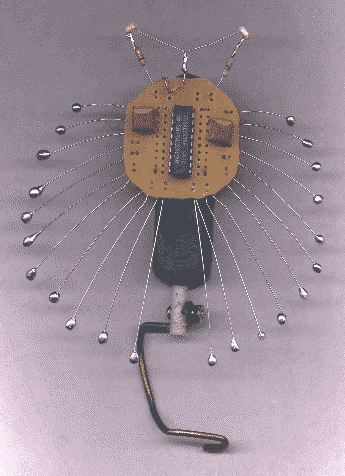
Why the "Floor Monkey"? Well, If you ask me, it looks like a robotic sea monkey to me! The thing flops around on the floor. Why not call it a floor monkey! I've made it resemble the brine shrimp artemia as closely as I could. It even has the anatomicaly correct 11 pairs of thoracopods (the "leg" like appendages). Of course, these are metal, and not realy a form of propulsion. Maybe someday. ( :

A real Brine Shrimp Artemia (aka. The Sea Monkey)

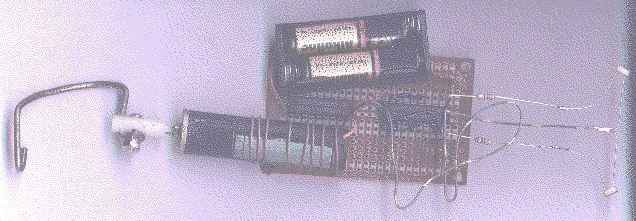
This is the original prototype of Floor Monkey
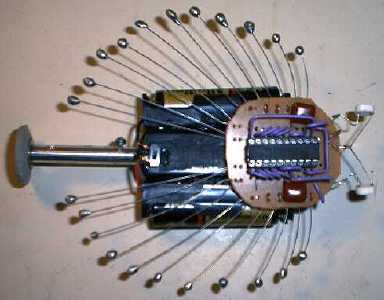
Floor Monkey evolved! ( :
| LinkExchange Member | Free Home Pages at XOOM | Free Home Pages at GeoCities |

|
The Richfiles is copyright © 1996-2000. All Rights Reserved.
