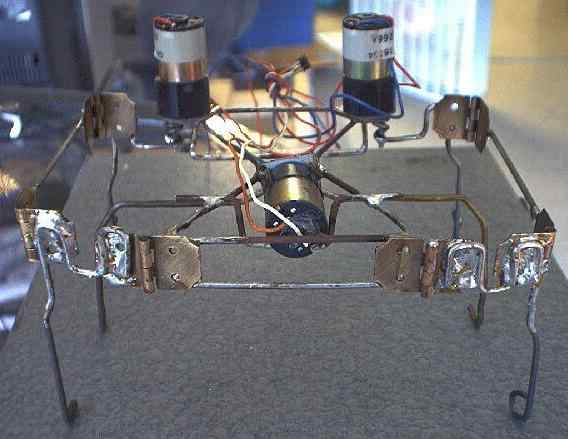
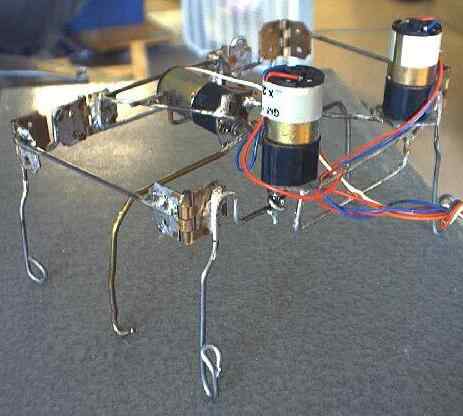
Hexapod is my second 6 legged robot. It's my first to use motors. The robot uses 3 motors and mechanical linkages. The middle pair of legs provide lift. The corner legs provide thrust. It forms a tripod gait when the one center leg goes down, lifting the two corner legs on it's side. The walking gait is very stable, and you can create forward, reverse, and turning motion very easily.
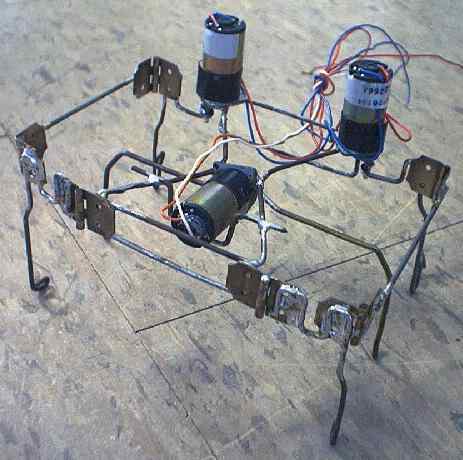
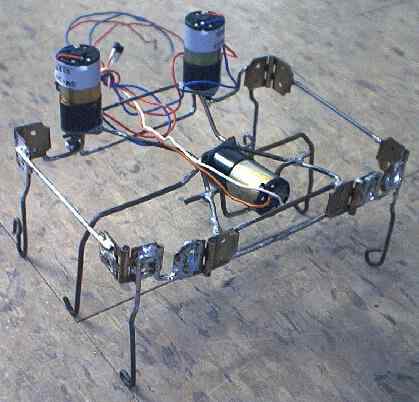
The robot will be driven by a microcore. I intend to have reversers on each side of the robot, to create the ability for it to turn, follow walls, and reverse. If possible, I'll add IR detection as well. The mechanics are mostly complete. I intend to add centering devices.
| LinkExchange Member | Free Home Pages at XOOM | Free Home Pages at GeoCities |

|
The Richfiles is copyright © 1996-2000. All Rights Reserved.
